
В статье представлены новые решения для цифровизации сетей с компенсацией емкостного тока: система GNSG (Grounding Neutral Smart Grid – «умная сеть для режимов заземления нейтрали»), обеспечивающая параллельную работу до восьми микроконтроллерных регуляторов МИРК‑5, шлюз PG5901‑TB‑50ES-MBSM для подключения регуляторов МИРК‑5 к АСУ ТП по протоколу МЭК 61850 (в соответствии с требованиями ПАО «Россети») и т. д.
ООО «МИКРО-Инжиниринг», г. Москва
![]()
Сегодня внедрение цифровых технологий в управление электросетевым комплексом охватывает все большее количество электросетевых компаний [1, 2]. Но для сетей с компенсацией емкостного тока на текущий день существует не так много технических решений, в основу которых положена идеология умных сетей (smart grid).
Умная сеть при параллельной работе дугогасящих реакторов
Для параллельной работы дугогасящих реакторов (ДГР) в ООО «МИКРО-Инжиниринг» была разработана специальная система GNSG (от англ. Grounding Neutral Smart Grid – «умная сеть для режимов заземления нейтрали») [3].
Предыстория вопроса такова: вплоть до настоящего дня при объединении секций один из регуляторов предварительно выводится вручную из автоматического управления. Это связано с тем, что при параллельной работе двух регуляторов возможен режим так называемых «качаний», то есть их поочередной перенастройки. В схемах управления с регуляторами МИРК* более 20 лет применяется схема автоматической блокировки одного из регуляторов при объединении секций от блок-контактов секционного выключателя. Однако данная схема имеет один недостаток: если ДГР, оставшийся в автоматическом управлении, находится близко к крайним положениям, то при дальнейшей параллельной работе и изменениях в сети регулятор переведет ДГР в крайнее положение и заблокируется, а реальный резонанс не будет найден.
При работе в «умной сети» GNSG такое становится невозможным, так как при объединении секций происходит арбитраж, то есть ведущим выбирается регулятор, ДГР которого находится в середине диапазона. Выбор осуществляется путем сравнения показаний от потенциометров положения плунжера всех ДГР (рис. 1.).

Рис. 1. Блок задания адресов устройств на CAN-шине (а) и блок потенциометра CAN-R (б)
С 2012 года все напольные шкафы на четыре регулятора с МИРК‑5 (или четыре одиночных шкафа с МИРК‑5) предусматривают параллельную работу всех четырех регуляторов по CAN-интерфейсу. В статье 2017 года [3] было рассказано об интеллектуальной системе управления режимами нейтрали GNSG, разработанной ООО «МИКРО-Инжиниринг» на базе микроконтроллерного регулятора МИРК‑5 для параллельной работы четырех регуляторов. Впервые такая система на регуляторах МИРК‑5 была внедрена в 2013 году на ПС «Самарская» и ПС «Одинцово» ПАО МОЭСК.
Все устройства на CAN-шине оснащены DIP-переключателями, с помощью которых каждому устройству присваивается уникальный идентификационный номер в диапазоне от 1 до 256. На рис. 1а показан универсальный блок для задания адресов в диапазоне 1–8, а на рис. 1б – блок потенциометра CAN-R для параллельной работы восьми регуляторов МИРК‑5.
Однако при проектировании ПС «Гольяново» ПАО «МОЭСК» в 2014 году выяснилось, что на данной ПС возможен режим параллельной работы шести регуляторов. Также при обследовании сетей 6–10 кВ ряда ТЭЦ ПАО «Мосэнерго» (например, ТЭЦ‑16 и ТЭЦ‑20) было установлено, что в данных сетях возможна параллельная работа от шести до восьми ДГР. Поэтому работа системы GNSG была расширена до восьми регуляторов.
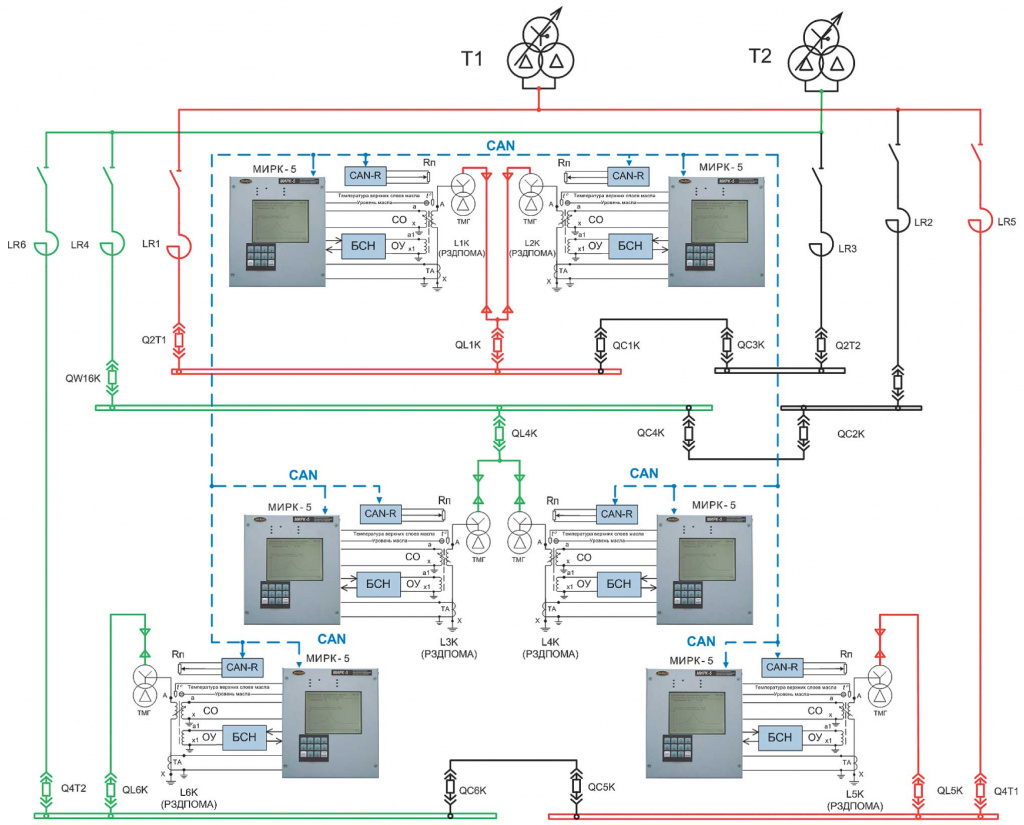
При этом следует отметить, что на ПС «Гольяново» (рис. 2) две пары дугогасящих реакторов L1K и L2K на 1 с. ш. (Т1) и L3K и L4K на 2 с. ш. (Т2) постоянно работают в режиме «master – slave» («ведущий – ведомый»). Дугогасящие реакторы L5K и L6K в зависимости от конфигурации сети могут работать 3‑м и 4‑м номером. А при параллельной работе всех шести ДГР ведущим назначается тот, у которого МИРК‑5 имеет 1‑й номер на шине CAN.

Рис. 2. Интеллектуальная система управления режимами нейтрали (Grounding Neutral Smart Grid, GNSG) для ПС «Гольяново» (увеличить изображение)
Следует отметить, что в настоящее время данной опции (параллельной работы восьми регуляторов) нет ни у одного зарубежного или отечественного регулятора.
Внедрение протокола МЭК 61850 для регуляторов МИРК‑5
В настоящее время на ПС ПАО «Россети» внедряется технология цифровой подстанции, основанная на поддержке протокола МЭК 61850. Работа с данным протоколом автоматических регуляторов ДГР предусмотрена отраслевым стандартом ПАО «Россети» СТО 34.01-3.2-008-2017.
Для подключения регуляторов МИРК‑5 к АСУ ТП по протоколу МЭК 61850 применяется шлюз PG5901‑TB‑50ES-MBSM, который подключается к МИРК‑5 по интерфейсу RS‑485 и выступает в качестве мастера шины RS‑485. К одному шлюзу PG5901‑TB‑50ES-MBSM может быть подключено несколько устройств МИРК‑5, имеющих разные адреса по интерфейсу RS‑485.
На рис. 3 также показано, что медиаконвертер RuggedCom RMC40‑HI-MT00‑XX конвертирует дальше Ethernet 10/100BaseTX в 100BaseFX (многомодовое оптоволокно). Это решение было реализовано на ПС «Майя» 220 кВ ПАО «ФСК ЕЭС» – МЭС Востока для шкафа управления двумя ДГР 35 кВ типа ШАРК‑02.2.

Рис. 3. Подключение регулятора МИРК‑5 к АСУ ТП ПС «Майя» по протоколу МЭК 61850 (увеличить изображение)
Настройка шлюза PG5901 осуществляется через специализированное программное обеспечение eNode Designer. В ПО eNode Designer существует возможность настройки устройств, параметров устройств и протоколов передачи данных. Для этого создается файл проекта ICD (CID), представляющий систему.
На рис. 4 представлен пример проекта CID-файла для двух устройств МИРК‑5, зарегистрированных как устройства SOPМ (Supervision of operating mechanism). Флаги состояния МИРК‑5 будут назначены на параметр SOPM0.DO. MotStr.DA типа INT32U.
В зависимости от требований проекта АСУ ТП подстанции, перечень регистров, получаемых от МИРК‑5, и их представление по протоколу МЭК 61850 может быть изменено.

Рис. 4. Пример проекта конфигурации устройства в ПО IEC 61850 ICD Designer‑2
В целях упрощения обмена данными по протоколу МЭК 61850 в МИРК‑5 (ПО версии 03.15.01 и выше) реализован отдельный регистр Status61850 типа UINT32 (адрес 0x058), содержащий большинство требуемых флагов сигнализации (табл. 2).
Таблица 2. Назначение битов регистра Status61850

Применение протокола Modbus RTU
Протокол Modbus RTU на регуляторах МИРК‑5 (4.2) применяется уже более 10 лет на нескольких десятках ПС, в том числе на таких олимпийских объектах в г. Сочи, как ПС «Роза Хутор», «Лаура», «Ледовый дворец».
На рис. 5 показана схема передачи информации от МИРК‑5 по протоколу Modbus RTU на ПС «Новая» Кемеровских ЭС, которую разработало НПО «МИР» (г. Омск). Так как на ПС «Новая» уже имелся программно-технический комплекс «МИР», то была осуществлена привязка к существующему ПАК (красным цветом выделены увеличенные отображения данных от регуляторов МИРК).

Рис. 5. Подключение МИРК‑5 к АСУ ТП ПС «Новая» по Modbus RTU
Запись и просмотр аварийных осциллограмм в формате COMTRADE
В регуляторе МИРК‑5 запись аварийных осциллограмм производится в формате COMTRADE. Просмотреть записанные осциллограммы можно как на графическом ЖКИ регулятора МИРК‑5 (рис. 5), так и в программе «МИКРО-Терминал» (рис. 6). На ЖКИ МИРК‑5 можно просматривать покадрово участки осциллограмм длительностью 175 мс.

Рис. 6. Просмотр аварийных осциллограмм на графическом ЖКИ МИРК‑5
Для просмотра аварийных осциллограмм в программе «МИКРО-Терминал» (рис. 7) в верхнем ленточном меню надо выбрать «Журнал» и скачать его. При просмотре журнала желтым цветом будут выделены события (ОЗЗ), имеющие файл в формате COMTRADE. Кликнув по желтой области левой клавишей мышки, можно инициировать скачивание файла. Процесс скачивания файла подтверждает скроллбар в нижней левой части (зеленого цвета).

Рис. 7. Просмотр аварийных осциллограмм записанных в формате COMTRADE в программе «МИКРО-Терминал»
Для сохранения файла осциллограмм в формате COMTRADE и просмотра в специализированных программах просмотра аварийных осциллограмм следует выбрать иконку в левом верхнем меню и сохранить данные в нужном месте (рис. 8).

Рис. 8. Сохранение файла аварийных осциллограмм в формате COMTRADE
На основании изложенного материала можно сделать вывод, что микроконтроллерный регулятор МИРК‑5 полностью реализует все требования, предъявляемые к устройствам автоматической компенсации как в части соответствия требованиям п. 8.6 СТО 34.01-3.2-008-2017, так и в части соответствия проекту «Цифровая РЭС».
Литература
1. Маковский И. В. Цифровизация электросетевого комплекса от интеллектуальных приборов учета до искусственного интеллекта // Энергоэксперт. 2018. № 4.
2. Дрегваль С. Г. Модель цифровизации МРСК Урала // Энергоэксперт. 2018. № 4.
3. Миронов И. А. Решения для умной энергетики. Системы автоматического управления ДГР // ИСУП. 2017. № 6.
____________________________
* Микроконтроллерные регуляторы МИРК разработаны и производятся ООО «МИКРО-Инжиниринг».
Опубликовано в журнале ИСУП № 2(80)_2019
И. А. Миронов, технический директор,
ООО «МИКРО-Инжиниринг», г. Москва,
тел.: +7 (495) 514-3144,
e‑mail: office@mikroinginiring.ru,
сайт: mikroinginiring.ru

_big.jpg'); "2(116)_small.jpg")

{kind=link}
{kind=link}