

Компания «ТЭС» предлагает потребителям собственные высокоэффективные преобразователи частоты серии «СИРИУС‑С8». В статье рассмотрены основные технические особенности ПЧ этой серии, а также новые возможности управления, связанные с применением энкодеров – датчиков скорости вращения электродвигателей.
ООО «ТЭС», г. Воронеж
![]()
Преобразователи частоты «СИРИУС‑С8»: основные функциональные возможности и характеристики
«СИРИУС-С8» – это серия векторных преобразователей частоты, которые позволяют точно выдерживать различные режимы управления работой электродвигателей (ЭД), выполнять регулировку и осуществлять защитные функции.
Одной из особенностей преобразователей частоты (ПЧ) серии «СИРИУС-С8» является возможность выбора типа управления электродвигателем – по скорости или крутящему моменту. В первом случае ПЧ использует в качестве опорного значения заданную скорость вращения электродвигателя (частоту его питающей сети) и осуществляет управление, поддерживая требуемую выходную частоту. Во втором случае в качестве опорного значения используется задание по крутящему моменту на валу электродвигателя и ПЧ осуществляет управление, поддерживая это предустановленное значение момента. В режиме управления по моменту обороты ЭД (скорость вращения) могут быть величиной, переменной во времени, однако при этом крутящий момент на валу – фиксированная величина.
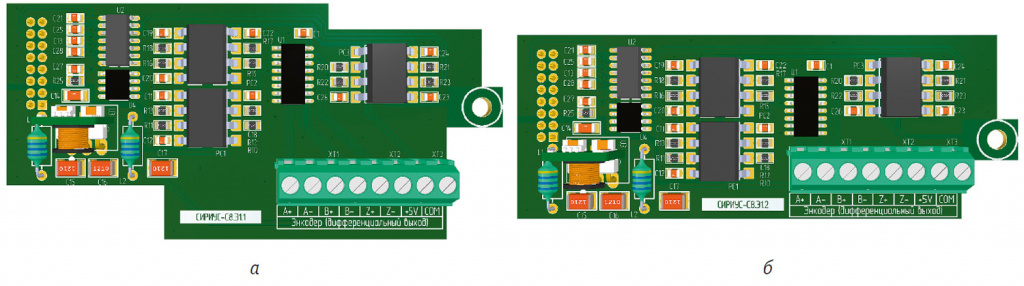
Основные технические и функциональные возможности преобразователей частоты серии «СИРИУС-С8» сведены в табл. 1.
Таблица 1. Технические и функциональные возможности преобразователей частоты «СИРИУС-С8» (увеличить изображение)
|
Характеристика |
Реализация в устройствах |
|
|
Параметры питающей сети |
3ф × 380 / 660–690 В ± 15 %, 50/60 Гц ± 5 % |
|
|
Выходное напряжение ПЧ, В |
3ф × 0~380 / 0~660–690 |
|
|
Максимальная выходная частота ПЧ, Гц |
· Векторное управление: 0~300 · U/f -управление: 0~3000 |
|
|
Несущая частота ПЧ, кГц |
0,5~16 |
|
|
Разрешение по частоте задания |
· Цифровое задание: 0,01 Гц · Аналоговое задание: 0,025 % от максимальной частоты |
|
|
Режимы управления ЭД |
· Векторное управление без датчика скорости ЭД · Векторное управление с датчиком скорости ЭД Скалярное U/f -управление · Управление скоростью: режим задания и поддержания скорости ЭД · Управление моментом: режим задания и поддержания крутящего момента на валу ЭД |
|
|
Поддерживаемые типы ЭД |
· Асинхронный ЭД с короткозамкнутым ротором · Синхронный ЭД на постоянных магнитах |
|
|
Возможность управления несколькими ЭД |
Имеется возможность подключения к ПЧ до двух ЭД (с индивидуальными настройками параметров этих ЭД) |
|
|
Автоматическая настройка ПЧ на параметры ЭД |
Имеется функция автонастройки ПЧ на параметры двух ЭД (с индивидуальными настройками на их параметры) |
|
|
Тормозной прерыватель |
· Встроенный: для ПЧ мощностью 37/45 кВт и ниже · Опциональный: для ПЧ мощностью 45/55 кВт и выше |
|
|
Пусковой момент |
· При работе на нагрузку с постоянным моментом на валу ЭД (общепромышленная нагрузка): 0,5 Гц / 150 % – при векторном управлении без датчика скорости ЭД; 0 Гц / 180 % – при векторном управлении с датчиком скорости ЭД · При работе на нагрузку с переменным моментом на валу ЭД (насосы и вентиляторы): 0,5 Гц / 100 % |
|
|
Глубина регулирования скорости ЭД |
1 : 100 при векторном управлении без датчика скорости ЭД) |
1 : 1000 при векторном управлении с датчиком скорости ЭД |
|
Точность поддержания скорости ЭД, % |
±0,5 при векторном управлении без датчика скорости ЭД |
±0,02 при векторном управлении с датчиком скорости ЭД |
|
Точность поддержания момента, % |
±5 при векторном управлении с датчиком скорости ЭД |
|
|
Перегрузочная способность ПЧ |
При работе на нагрузку с постоянным моментом на валу ЭД (общепромышленная нагрузка): · 60 с при 150 % от номинального выходного тока; · 3 с при 180 % от номинального выходного тока. При работе на нагрузку с переменным моментом на валу ЭД (насосы и вентиляторы): · 60 с при 120 % от номинального выходного тока; · 3 с при 150 % от номинального выходного тока |
|
|
Усиление момента |
· Автоматическое усиление · Ручное усиление в диапазоне 0,1~30,0 % |
|
|
U/f-зависимость в скалярном режиме управления |
· Прямолинейная U/f-зависимость · Ручное задание U/f-зависимости по точкам · Квадратичные U/f-зависимости (U/f 1,2 , U/f 1,4, U/f 1,6, U/f1,8, U/f 2) · Два режима независимого задания U и f: полностью раздельное задание U и f; частично независимое задание U и f |
|
|
Кривые разгона / торможения ЭД |
· Прямолинейный разгон/торможение · S-образный разгон/торможение · 4 группы времен разгона/торможения с диапазоном установки 0,00~65 000 с |
|
|
Режим торможения ЭД постоянным током |
· Частота перехода в режим торможения постоянным током: 0,00 Гц ~ максимальная выходная частота · Время торможения постоянным током: 0,0~36,0 с · Ток в режиме торможения постоянным током: 0,0~100,0 % |
|
|
Шаговый режим управления ЭД |
· Опорная частота в шаговом режиме: 0,00~50,00 Гц · Время разгона/торможения в шаговом режиме: 0,00~65 000 с |
|
|
Режим ПЛК, многоскоростной режим |
Возможно предопределение до 16 скоростей ЭД |
|
|
ПИД-регулирование |
Имеются 2 встроенных ПИД-регулятора с независимыми настройками |
|
|
Автоматическая регулировка напряжения |
ПЧ автоматически поддерживает выходное напряжение неизменным при колебаниях входной питающей сети |
|
|
Предотвращение перенапряжения и токовых перегрузок |
ПЧ автоматически предотвращает перенапряжение на шине постоянного тока и токовые перегрузки ЭД во время работы путем корректировки выходной частоты |
|
|
Функция токоограничения |
Возможно ограничение выходного тока ПЧ во время его работы путем корректировки выходной частоты |
|
|
Контроль и ограничение момента |
Возможны контроль и ограничение выходного момента ПЧ во время его работы путем корректировки выходной частоты. Данная функция возможна при векторном управлении с датчиком скорости ЭД |
|
|
Защита от перегрева ЭД |
Поддержка датчиков перегрева ЭД типа PT100, PT1000 (опционально) |
|
|
Поддерживаемые протоколы при сетевом обмене |
· Modbus RTU (стандартно) · PROFIBUS-DP (опционально с коммуникационным модулем СИРИУС-С8.PB-DP) · Прочие коммуникационные интерфейсы и протоколы (опционально) |
|
|
Программное обеспечение |
Позволяет осуществлять управление, настройку, мониторинг работы ПЧ |
|
|
Режимы управления ПЧ |
· С пульта управления · С клемм цепей управления · По интерфейсу RS-485 · Комбинированный режим управления |
|
|
Режимы задания опорного значения |
· Цифровое задание · Аналоговое задание · Задание через высокочастотный импульсный вход · Задание через интерфейс RS-485 · Комбинированный режим задания |
|
|
Пульт управления |
· Стандартно: пульт управления с LED-дисплеем. Допускается выносить на расстояние до 100 м с применением обычной витой пары (Ethernet RJ-45), допускается одновременно подключать 2 пульта управления · Опционально: пульт управления с LCD-дисплеем |
|
|
Защитные функции |
· Защита от короткого замыкания в нагрузке, защита при обрыве входной/выходной фазы, защита от перегрузки по току, защита от перенапряжения, индикация низкого уровня напряжения, защита от перегрева ПЧ, защита от чрезмерной механической перегрузки и т.д. · Степень защиты корпуса: IP20 (стандартно), IP21 (опционально) |
|
|
Соответствие требованиям по ЭМС и безопасности, ТУ |
· ТР ТС 004/2011 «О безопасности низковольтного оборудования» · ТР ТС 020/2011 «Электромагнитная совместимость технических средств» · IEC/EN61800-5-1: 2003 «Требования по безопасности, предъявляемые к системам электроприводов с регулируемой скоростью» · IEC/EN61800-3: 2004 «Системы электроприводов с регулируемой скоростью (часть 3). Стандартные требования к электромагнитной совместимости продукции и специальные методы испытаний» · Номер технических условий: НВПЧС.435421.001ТУ «Преобразователи частоты. Технические условия» |
|
|
Условия среды эксплуатации |
Внутри незапыленного помещения, при отсутствии прямых солнечных лучей, не выше 1000 м над уровнем моря |
|
|
Температура и влажность при эксплуатации |
-10…+40 °C при относительной влажности до 95 %, без конденсата |
|
|
Вибрации при эксплуатации, g, не более |
0,6 |
|
|
Температура хранения, °C |
-20…+60 |
|
|
Способ охлаждения |
Воздушное, принудительное |
|
При использовании различных математических моделей векторные частотные преобразователи способны не только контролировать работу статора и ротора ЭД, но и учитывать их взаимодействие, обеспечивая адаптацию крутящего момента и скорости вращения к требуемому режиму управления, благодаря чему достигается наибольшее значение КПД. Частотные преобразователи серии «СИРИУС‑С8» поддерживают работу в трех режимах управления электродвигателями, в числе которых векторное в замкнутой (с датчиком скорости) и разомкнутой (без датчика скорости) системах, а также cкалярное (вольт-частотное) управление, обеспечивающее поддержание предопределенной зависимости U/f – соотношения частоты питающей сети электродвигателя и уровня его напряжения питания.
Повышение точности управления с помощью энкодеров
Для прецизионного регулирования скорости и позиционирования вала электродвигателя в состав электропривода включаются энкодеры. Использование частотно-регулируемого привода с датчиками скорости и положения позволяет отойти от эксплуатации дорогостоящих сервоприводов.
В настоящее время широко применяются и наиболее популярны ABZ-энкодеры. Рассмотрим принцип работы преобразователя частоты серии «СИРИУС-С8» в системе электропривода, в состав которой входит ABZ-энкодер с дифференциальным выходом или N‑P‑N‑выходом.
Основные различия между ABZ-энкодерами с дифференциальным выходом и ABZ-энкодерами с N‑P‑N-выходом сводятся к типу выходных сигналов и способу их интерпретации преобразователем частоты. Для физической интеграции преобразователей частоты «СИРИУС-С8» в системы электроприводов с ABZ-энкодерами компания «ТЭС» спроектировала и в настоящий момент серийно производит специализированные платы расширения, позволяющие осуществлять подключение энкодеров напрямую к ПЧ. Тем самым обеспечена возможность реализовать алгоритмы высокоточного векторного управления в режиме замкнутого контура с каналом обратной связи по скорости электродвигателя. Речь идет об устанавливаемых в преобразователи частоты «СИРИУС-С8» платах СИРИУС-С8.Э1.1, СИРИУС-С8.Э1.2 для сопряжения с ABZ-энкодерами с дифференциальным выходом (рис. 1) и платах СИРИУС-С8.Э2.1, СИРИУС-С8.Э2.2 для сопряжения с ABZ-энкодерами с N‑P‑N-выходом (рис. 2).

Рис. 1. Платы сопряжения для подключения ABZ-энкодеров с дифференциальным выходом: а –СИРИУС-С8.Э1.1; б – СИРИУС-С8.Э1.2 (увеличить изображение)

Рис. 2. Платы сопряжения для подключения ABZ-энкодеров с N-P-N-выходом: а – СИРИУС-С8.Э2.1; б – СИРИУС-С8.Э2.2 (увеличить изображение)
В основе функционирования системы частотно-регулируемого привода с ABZ-энкодером лежит измерение и кодирование положения вращающегося вала ротора электродвигателя. Энкодер воспринимает вращение и формирует сигналы, которые затем подаются на преобразователь частоты. ПЧ принимает сигналы от энкодера и интерпретирует их для определения текущего положения вала ротора (скорости его вращения).
Выход ABZ-энкодера имеет три набора сигналов: А и В – две фазы (каналы) сигналов и Z – сигнал обратного обнуления (reference mark). ABZ-энкодер с дифференциальным выходом выдает сигналы в виде пары синусоидальных сигналов, которые смещены по фазе на 90 градусов и дают информацию о положении и направлении вращения в аналоговом виде. ABZ-энкодер с N‑P‑N-выходом представляет собой трехфазное устройство с сигналами A, B и Z, однако в отличие от дифференциального энкодера N‑P‑N-энкодер имеет выходные сигналы, которые представлены состоянием транзисторов: открытый или закрытый. Состояние открытого транзистора соответствует логическому уровню «1», а закрытого – «0». Таким образом, N‑P‑N-энкодер генерирует цифровые сигналы, имеющие логический уровень. Комбинация ABZ-сигналов обеспечивает возможность контроля обратного обнуления или конкретного положения вала ротора электродвигателя с помощью сигнала Z. Это может быть полезно, например, при необходимости вернуть механизм в определенное начальное положение или при потребности сориентироваться относительно опорной метки.
Выбор между ABZ-энкодерами с дифференциальным или N‑P‑N-выходом зависит от требований конкретной электроприводной системы, ее бюджета и возможностей используемого оборудования. В общем случае дифференциальные энкодеры обеспечивают более высокую точность и шумоподавление, но требуют более сложного физического подключения, в то время как N‑P‑N-энкодеры проще в подключении, но могут быть менее точными в некоторых случаях.
Преобразователи частоты серии «СИРИУС-С8» способны принимать и интерпретировать наборы ABZ-сигналов как от дифференциальных, так и от N‑P‑N-энкодеров, используя их для определения изменений положения вала ротора и, соответственно, скорости электродвигателя. Расшифровка ABZ-сигналов позволяет преобразователям частоты «СИРИУС-С8» осуществлять высокоточное управление циклами работы электропривода (скоростью вращения или перемещения механизма) за счет быстрого реагирования на его пространственные изменения в реальном времени.
Опубликовано_в журнале ИСУП № 6(108)_2023
А. С. Лапков, генеральный директор,
руководитель направления частотно-регулируемого привода,
ООО «ТЭС», г. Воронеж,
тел.: +7 (473) 258‑5092,
e-mail: inforus-privod.ru
Иллюстрации предоставлены компанией ООО «ТЭС»
_big.jpg'); "2(116)_small.jpg")

{kind=link}
{kind=link}